☰



By Russell Goldman, Founder of Buildable Engine
In our last piece, we argued that construction has become an information industry wrapped around a building site—and that the coordination failures driving up overhead are not field problems. They are upstream information failures that travel until they become someone else's expensive problem.¹ The question we didn't fully answer is what happens to that argument when the downstream actors aren't people anymore.
Physical automation in construction is attracting serious capital. The global construction robotics market was valued at $1.4 billion in 2024 and is projected to reach $3.7 billion by 2030, growing at roughly 18% annually.² The investment thesis, broadly stated, is that robots can absorb the labor shortage, improve precision, and reduce the cost of getting things built. That thesis is directionally correct. But it rests on an assumption that tends to go unstated: that the information the robots are acting on is trustworthy.
It usually isn't. And when it isn't, the consequences of automation are not the elimination of error — they are the acceleration of it.
The standard framing in construction technology treats field automation and office intelligence as separate investment categories. Software for the pre-construction phase, robots for the field phase. Efficiency upstream, efficiency downstream. The categories are clean, and they are wrong.
Productivity in any complex system is not a property that lives at a single node. It is a function of how well every actor in the system — every decision-maker, every reviewer, every piece of equipment — is operating from information it can trust. When the information is correct, precision at any node compounds into value. When it is wrong, precision compounds into cost. A crew executing flawlessly from a plan with unresolved conflicts produces expensive rework faster than a less efficient crew would. The same logic applies to machines.
This is not an abstract observation. According to a joint report by Autodesk and FMI, bad data caused an estimated $88.7 billion in construction rework globally, and accounted for roughly 14% of all construction rework in the United States.³ A separate Dusty Robotics analysis found that poor coordination and layout conflicts cost the industry an average of 10% of project profit margins.⁴ These costs exist in the current system, where most field execution is still manual. When field execution becomes robotic — faster, more precise, less tolerant of ambiguity — the financial exposure from bad upstream data does not decrease. It scales.
Every robot that arrives on a jobsite is a consumer of information that was produced somewhere else, by someone else, often weeks or months earlier. The quality of what it builds is bounded by the quality of what it was given to work from.
Before arguing about data dependencies, it's worth being precise about the landscape. Construction robotics is not a single category. It is a collection of distinct system types, each with a different relationship to the physical environment, to design data, and to the decisions that precede their deployment. The peer-reviewed literature from the Journal of Field Robotics identifies the relevant taxonomy: from robotic manipulators and mobile construction robots through UAVs, automated guided vehicles, and autonomous heavy machinery.⁵
For the purposes of this argument, five categories matter. The diagram below maps them by their relationship to upstream design data — a distinction the rest of this argument depends on.
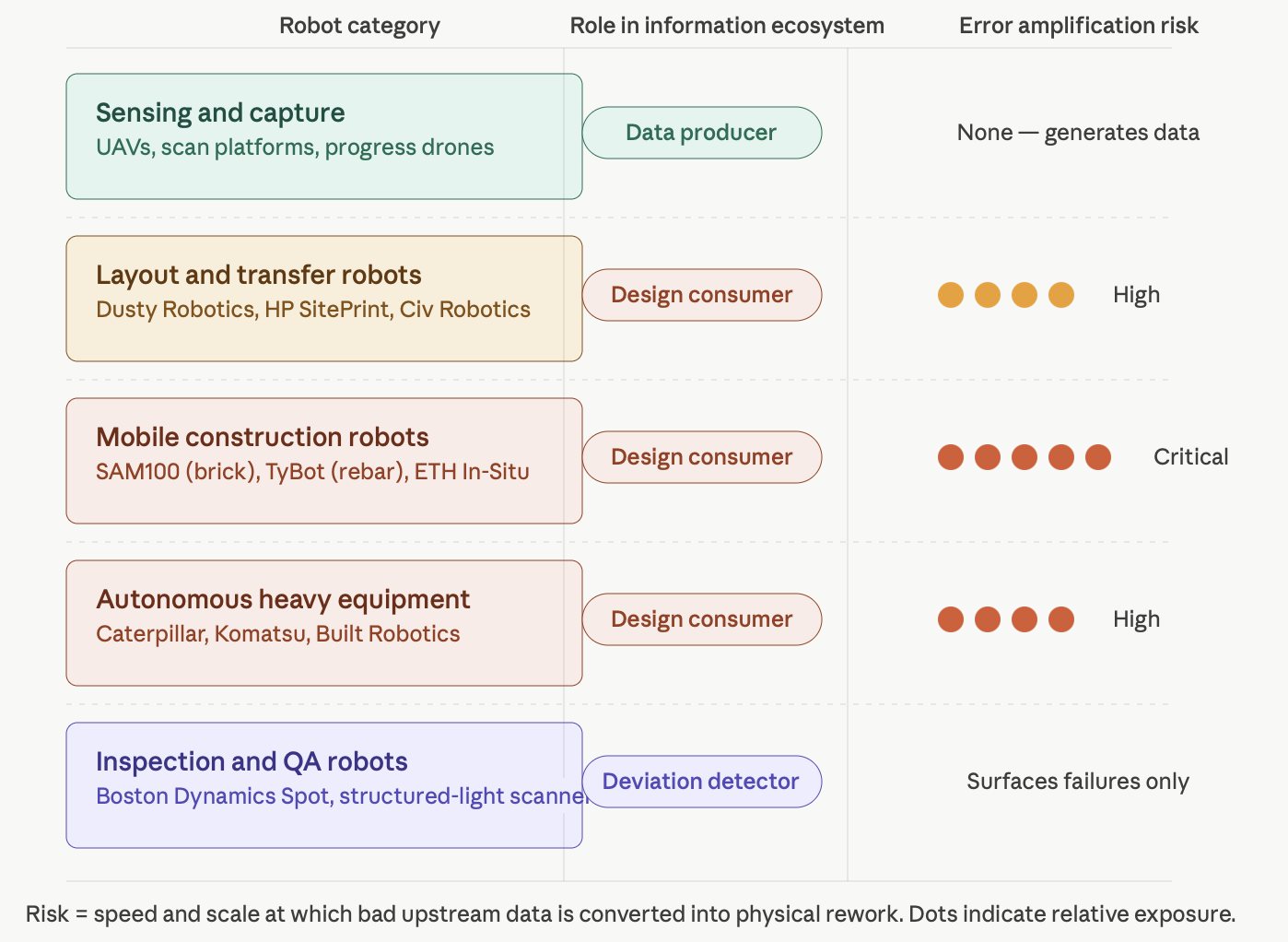
Sensing and capture systems read the physical world and produce data. UAVs conducting photogrammetric surveys, scanning platforms like Matterport and NavVis, and progress monitoring drones all belong here. Their output is a description of what physically exists — point clouds, thermal maps, deviation reports. They are producers in the information ecosystem, not consumers of design intent.
Layout and transfer robots translate digital intent into physical marks. Dusty Robotics' FieldPrinter is the clearest commercial example: it ingests a coordinated BIM or CAD model, navigates the slab using a laser tracker for localization, and prints multi-trade layout at 1/16-inch accuracy. HP's SitePrint and Civ Robotics operate similarly. The job of a layout robot is to take what was decided in the model and make it visible on the deck.
Mobile construction robots are fabrication platforms — systems that actually build things. The SAM100 lays brick at rates that far exceed manual labor. TyBot ties rebar autonomously. Research platforms like the ETH Zurich In-Situ Fabricator represent the frontier of what fully autonomous fabrication can eventually look like. These systems consume instructions and produce physical construction.
Autonomous heavy equipment operates at the earthwork and site preparation layer. Caterpillar, Komatsu, and Built Robotics — which has raised over $112 million to retrofit existing excavators with autonomous capabilities⁶ — are building systems that execute grading and material movement missions. Their positioning systems fuse RTK GPS with inertial measurement units (IMUs), and their task execution depends on digital terrain models and site plans that define the intended finished condition.
Inspection and QA robots close the loop. Boston Dynamics' Spot, configured for construction inspection, navigates job sites autonomously, captures spatial data, and compares observed conditions against design intent. These systems answer a specific question: does what was built match what was specified?
Not all of these categories are equally sensitive to the quality of upstream design data. Understanding that distinction is what makes the investment argument precise — and it's what most coverage of construction robotics gets wrong by treating all automation as equivalent.
Sensing and capture systems are the exception. Their job is to produce data, not consume it. A drone conducting a photogrammetric survey doesn't need to know whether the design it's flying over is code-compliant. The dependency runs the other way: sensing robots generate the data that every other system and human acts on.
Every other category is a consumer of design intent, and the quality of what they produce is a direct function of the quality of what they're given to work from — for reasons grounded in how these systems technically function.
Layout robots make this most transparent. A layout robot's positioning system relies on a laser tracker that localizes the robot relative to a known coordinate reference. That reference is the design model itself. Researchers publishing in ScienceDirect describe the core technical challenge: robots operating in construction environments use Simultaneous Localization and Mapping (SLAM) algorithms to build a real-time map of the space while tracking their own position within it, and increasingly, BIM geometry is used to initialize and anchor that localization.⁷ The design model is not just the task specification — for an autonomous system navigating a structure, it is often the coordinate system the robot uses to know where it stands.
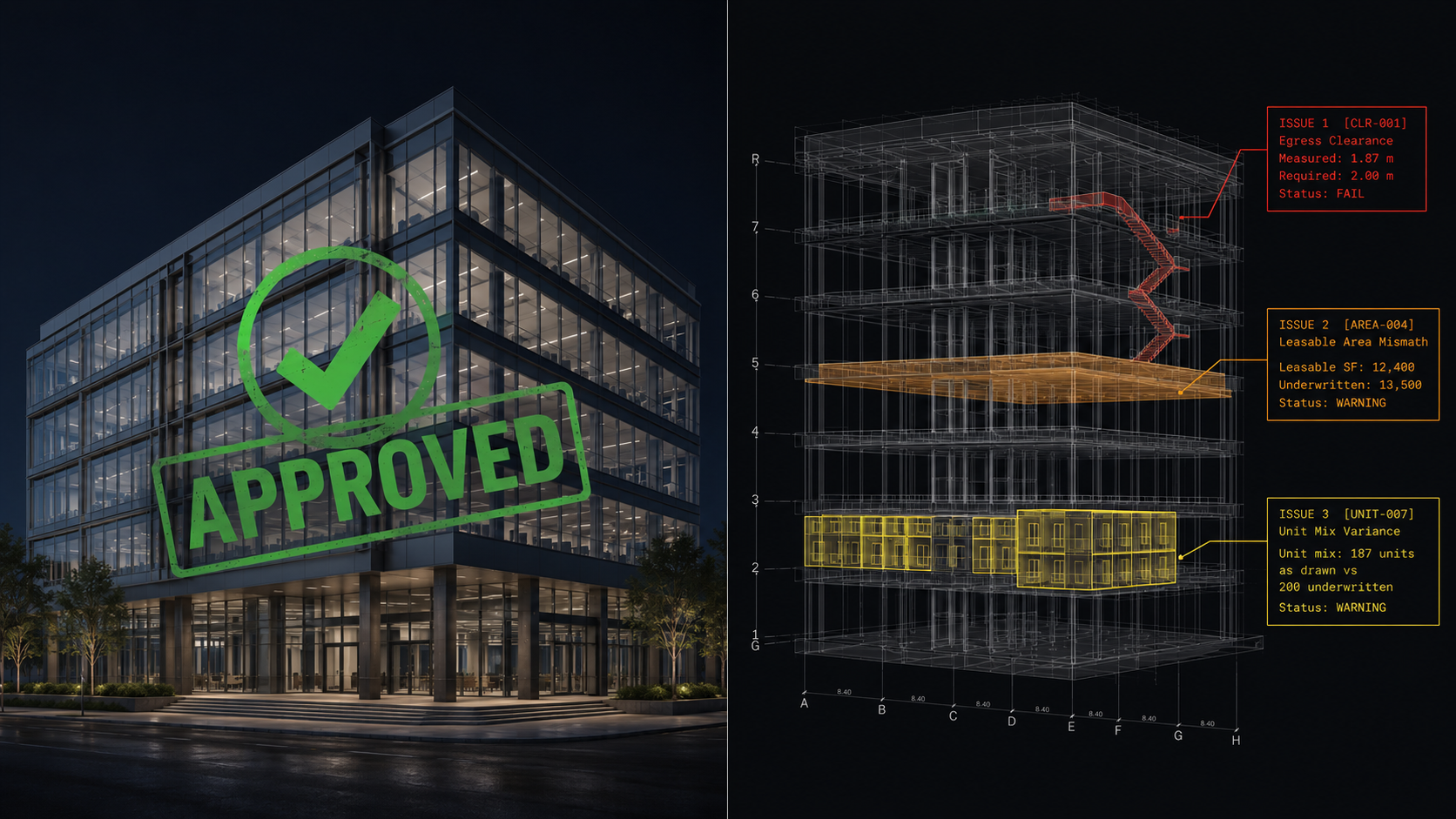
When Dusty Robotics prints at 1/16-inch accuracy, that precision is relative to the model it's executing from. If the model contains a coordination conflict — a mechanical sleeve positioned where a structural member runs, a wall dimension that doesn't reconcile with an adjacent unit — the robot prints that conflict at 1/16-inch accuracy. The error is not caught; it is certified.
Autonomous heavy equipment faces the same structural dependency at a different layer. Terrain models and site plans define the finished conditions that grading systems are trying to achieve. If those plans haven't been reconciled against current entitlements, updated survey data, or neighboring infrastructure, the autonomy stack executes on whatever it was given. Construction sites present unique localization challenges precisely because the environment is changing constantly as work proceeds.⁸
Mobile construction robots extend the dependency further. Fabrication systems require not just a design model but a constructible one — a model in which the geometry, tolerances, material specifications, and sequencing constraints have been resolved in advance. The robot can place material with high precision, but only within the tolerance of the instructions it received.
Inspection and QA robots sit at the end of this chain and surface its failures. A Spot robot comparing as-built conditions to design intent can identify deviations — but it cannot tell you whether the original design was correct to begin with. A deviation report tells you what was built differs from what was drawn. It cannot tell you which one was wrong.
The right frame for this is not software versus hardware, or upstream versus field. It is that every actor in the construction system — every lender's consultant, every permit reviewer, every trade coordinator, every layout robot, every autonomous grading machine — is a consumer of the same underlying information. The reliability of that information determines the value of every other investment in the system.We call this category Buildability Intelligence™ — the systematic capacity to evaluate whether a design can actually be built, before a permit is filed or a foundation is poured. We've written about what that means in depth here.
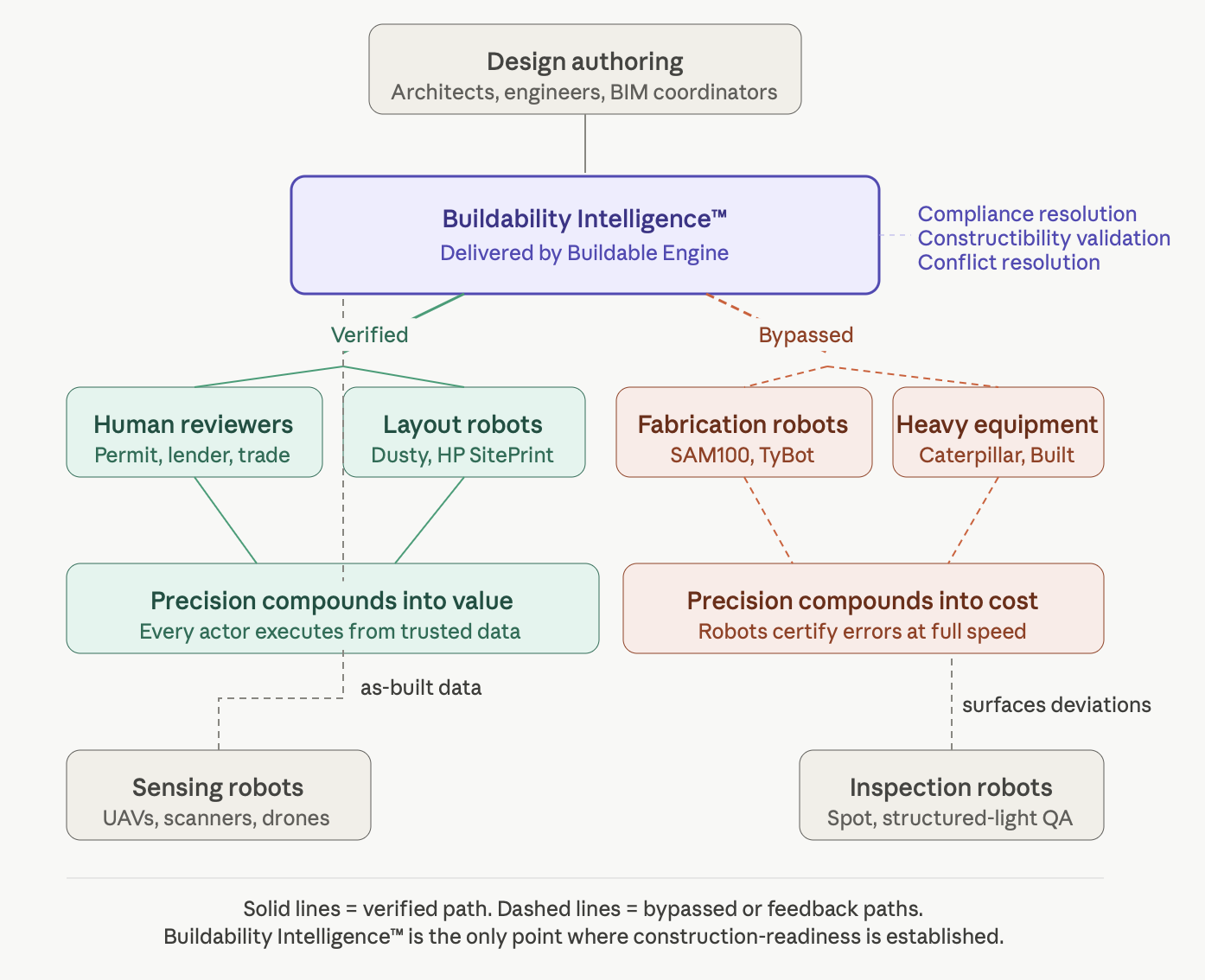
These are not separate requirements expressed by different stakeholders. They are the same requirement expressed at different nodes in the same value chain. An intelligence layer that resolves conflicts, verifies compliance, and validates constructibility before permit submission is not serving white-collar stakeholders at the expense of field stakeholders. It is serving the system — including every machine that eventually operates within it.
McKinsey's research found that labor productivity in construction has averaged only 1% annual growth over two decades, compared to 2.8% for the total world economy and 3.6% for manufacturing.⁹ Since 2020, venture capital and private equity have invested roughly $50 billion in AEC technologies globally — 85% more than the prior three years.¹⁰ Most of that investment has gone to tools that accelerate execution. Very little has gone to the layer that determines whether what gets executed is correct.
The construction technology investment community tends to evaluate physical automation and intelligence automation separately because they look different — one is hardware, one is software; one is visible on the job site, one lives in a cloud server. But they are not independent. They are sequential. The performance ceiling of any physical automation system is set by the quality of the information it operates from. Value projections for field robotics that don't account for data quality risk are systematically optimistic.
The firms that will realize the full value of physical automation are not necessarily the ones that deploy it first. They are the ones whose design data is already trustworthy when they do. Building that foundation—resolving compliance conflicts, validating constructibility, establishing a verified model before permit submission—happens today, before any robot is on site. But it is also the work that determines whether robotics, when it arrives, compounds into productivity or compounds into cost.
Every robot that arrives on a job site is asking the same question every coordinator, every reviewer, and every lender's consultant is asking: can I trust what I've been given to work from? Until the answer is reliably yes, the promise of automation will keep arriving in parts, performing well in isolation, and falling short of the compounding gains the industry needs.
We are building the layer that makes the answer yes.
If you're a builder, developer, architect, lender, or technology investor thinking about what this operating model looks like in practice, we'd welcome the conversation.
Sources

Buildings accumulate disconnected representations of themselves from the moment design begins — drawings, models, specifications, and field records that were never designed to stay in sync — and most of the built environment is operated, maintained, and traded against information that stopped matching physical reality the day construction began. The industry has built an entire economy of workflows to manage that drift, and the next significant shift in construction software is treating it as an infrastructure problem rather than a documentation one.
An important but underappreciated distinction exists between probabilistic AI (large language models that generate plausible outputs) and deterministic AI (systems that encode explicit rules and produce auditable findings) — and the construction, architecture, and engineering industries are deploying the wrong one at scale, misallocating both talent and capital in the process. The problem is now becoming structural: the largest AI labs in the world are embedding their engineers directly inside the industries that need a fundamentally different kind of AI, locking in the wrong infrastructure before the market has learned to tell the difference.